Writing A Threadpool in Rust
多线程一直是我相当不相碰的东西,总觉得看起来很棒,用起来却一点都不放心——尤其是过去用Delphi体验了多线程之后。实际上到了多线程里根本就没法定位那里出了错误,因此大部分时间压根不是在“调试”,而是告诉用户怎么用才能避免这个错误。在给OOC写MultiTheard Generating的时候我也紧紧用了最简单的ThreadPool,并且因为互斥锁多线程还没有单线程快。总之,这么多年我一直有意的躲避多线程的问题。
而Rust一直在宣传它在多线程上的优势——所有权如何的好,在Servo里面他们如何用Rust写了个漂亮的Parallel Parser。加上最近一年一直再用Rust写游戏的服务器,于是我决定回头看看Rust下的多线程体验到底如何。
ThreadPool
相比简单的用多线程算个加法,或者写个The Computer Language Benchmarks Game的测试程序来说,ThreadPool可能更适合练手。在这里,我会实现下面这个结构的ThreadPool:
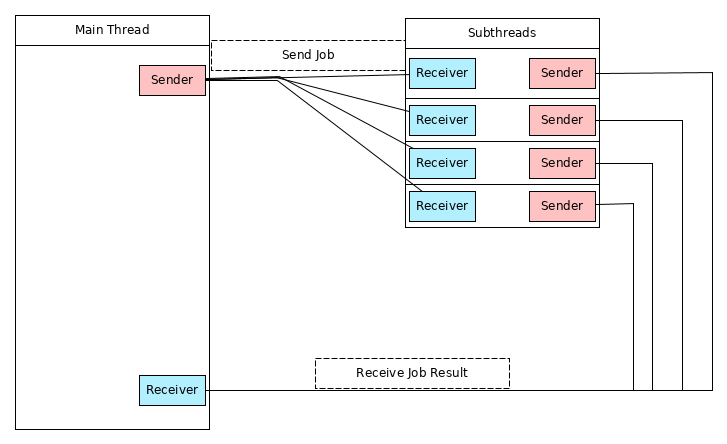
简单来说,主线程通过Channel向ThreadPool发送Job,然后Threadpool里的每一个子线程在空闲时都会尝从Channel里获取Job,然后执行它。执行完毕之后,Job的返回结果会通过另一个Channel传送给主线程。实际上,在C或Delphi里,实现这么一个东西似乎并不是很困难,然而,Rust因为独特的所有权制度,代码比思路要复杂一些,下面,让我们来看看怎么实现这个ThreadPool。
Jobs for the Job
首先,让我们来设计Job,在这篇文章里,Job总是一个没有参数的函数,用代码来说,是这样:
type Job<T> = Box<Fn() -> T + Send + 'static>
由于我们需要把返回值传回给主线程,因此Job的返回值需要Send属性。这里,没有用FnOnce而是Fn仅仅是因为目前Rust的Box并不支持BoxBoxFn来增加文章的复杂度。
对于每一个线程,Job大概是这样使用的:
loop {
if let Ok(f) = get_a_job() {
send_to_main_thread(f());
}
}
我们每个线程都会不停的尝试获取job,执行它,然后获取下一个。相信到这里已经有不少人发现了问题:这个子线程似乎永远都无法结束。因为get_a_job显然只能返回Ok或阻塞——如果当Channel为空它就出错的话,一旦没有新任务,所有的子线程都会退出,之后这个ThreadPool就再也没法用了。于是,为了让这个子线程能退出,我们给Job添加一个用来表示结束的状态:
enum Message<T> {
Work(Box<Fn() -> T + Send + 'static),
Terminate,
}
type Job<T> = Message<T>;
这样,一旦Job是Terminate,线程就知道ThreadPool已经准备退出了。于是,我们可以把子线程写成这样:
loop {
if let Ok(f) = get_a_job() {
match f {
Message::Work(f) => f(),
Message::Terminate => break,
}
}
}
有了这个定义之后,让我们来看看ThreadPool该怎么设计。
从前一节的图片里,我们知道这个ThrealPolo需要两个Channel,一个用来接受新Job,另一个用来发送Job的返回结果,因此,ThrealPool可以写成这样:
struct ThreadPool <T>{
sender: mpsc::Sender<Job<T>>,
pub result: mpsc::Receiver<T>,
threads: Vec<Option<thread::JoinHandle<()>>>,
}
这里,我们用了std::sync::mpsc,而threads则是用来储存所有子线程的,毕竟在结束的时候我们还要关闭他们的句柄。下面,我们尝试生成这个ThreadPool。由于子线程数是静态的,几乎所有的工作都可以在new里面完成,我们的大致思路是这样:
- 生成两个Channel, A和B,A用来接受Job,B用来发送结果
- 生成n个线程,每一个线程里:
- 保留A的Receiver和B的Sender
- 通过A的Receiver接受Job,执行,通过Sender发送
看起来并不是很难,让我们把它变成代码:
impl<T> ThreadPool<T> where T: Send + 'static {
....
// n是线程数,s是每一个线程获取新Job时的等待时间
fn new(n: usize, s: u64) -> Self {
// 用来接收Job的channel
let (tx, rx) = mpsc::channel();
// 用来发送结果的Channel
let (tx1, rx1) = mpsc::channel();
let rx : Arc<Mutex<mpsc::Receiver<Job<T>>>> = Arc::new(Mutex::new(rx));
首先我们定义了必要的channel,需要注意的是,对于channel,通常我们认为Sender可以有多个,但Receiver只有一个,因此在设计时Sender可以自然应对多线程,但Receiver则不。对于我们这里的情况,可以手动对Receiver加一个互斥锁,在Rust里可以使用std::sync::Mutex。
下面就是生成n个线程了:
let v = (0 .. n).map(| _ | {
let rx = rx.clone();
let tx1 : mpsc::Sender<T> = tx1.clone();
Some(thread::spawn(move ||
loop {
if let Ok(f) = rx.lock() {
if let Ok(f) = f.recv() {
match f {
Message::Work(f) => {
let r : T = f();
tx1.send(r);
},
Message::Terminate => break,
}
} else {
thread::sleep(Duration::from_millis(s));
}
}
}
))
}).collect::<Vec<_>>();
这里,thread::spawn用来生成新的线程,每个线程所作的事情就如之前描述的一样。最后,把这一切合起来,就可以得到一个ThreadPool了:
ThreadPool {
sender: tx,
result: rx1,
threads: v,
}
有了这个ThreadPool之后,我们还需要一个方法来随时向里添加新Job,不过这件事情非常简单——只需要通过sender发送就够了:
fn add(&self, f: Job<T>) {
self.sender.send(f).unwrap();
}
为了简单,我们并没有处理send返回的错误,在实际应用里,add可以返回Result。
Finishing and Drop
实际上,到此为止,大部分工作已经结束了,最后还有一个小事情:ThreadPool没法自己结束,因此我们需要手动实现这一部分。在其他语言里析构可能是理所当然的,不过在Rust里,除了C/C++的Wrapper之外,这种事情并不常见。Rust提供了Drop Trait来实现析构,Drop里的drop函数会在内存释放前自动执行。因此,我们只需要这么做:
impl<T> Drop for ThreadPool<T> {
fn drop(&mut self) {
for _ in &self.threads{
self.sender.send(Message::Terminate);
}
for t in &mut self.threads {
if let Some(t) = t.take() {
t.join().unwrap();
}
}
}
}
在这里,我们先对每一个线程发送结束命令,然后等待他们结束(join)。在实际应用里,线程可能会因为Job比较耗时而无法处理Terminate命令,Drop也会卡在Join的部分,不过可惜的是Rust的Thread并没有提供non-blocking的方法,因此你可能需要Future-rs来实现non-blocking的join。
Try It
到这里,主要部分已经完成了,下面我们来测试一下这个ThreadPool的效果如何:
fn main() {
let tp = ThreadPool::new(10, 100);
for i in 0 .. 100 {
tp.add(
Message::Work(
Box::new(move || { println!("Thread: {}", i); i*100 })));
}
let mut c = 0;
loop {
if let Ok(s) = tp.result.recv() {
println!("Result: {}", s);
c += 1;
} else {
thread::sleep(Duration::from_millis(10));
}
if c == 100 {
break;
}
}
}
线程池有10个子线程,每个Job会输出一行文字,并返回一个数字,编译执行后,结果看起来像这样:
Thread: 0
Thread: 1
Result: 0
Result: 100
Thread: 2
Thread: 3
Result: 200
Result: 300
Thread: 4
Thread: 5
Thread: 6
Result: 400
Result: 500
Result: 600
......
Conclusion
在文章里,我尽量平白的描述这个过程,不过如果在没有基础的情况下自己去写的话,可能会遇到很多有趣的问题,比如:实际上thread.join会消耗掉JoinHandle的,因此,如果用Vec<JoinHandle>来储存线程句柄的话,会无法编译通过——因为drop是by ref的。在这篇文章里,我用了跟The Book同样的方法:添加一个Option来解决这个问题。不过,The Boox并不代表着最好的解决办法,比如我们还可以:
while let Some(e) = self.threads.pop() {
e.join().unwrap();
}
对我来说,这个办法看起来更加简洁和优雅——但不知为什么The Book没有这么做。